When Snowpack is the Question, Terrain is the Answer
By John Sykes
This article initially appeared in The Avalanche Journal, Volume 138, Summer 2025
AVALANCHE EDUCATION OFTEN presents terrain as a static factor that is used to manage safety margins during periods of unstable weather and snowpack conditions. While true, this characterization of terrain does not mean assessing avalanche terrain is a simple task. On the contrary, thoroughly assessing avalanche terrain goes way beyond slope incline—it requires evaluation of many contributing factors including slope shape, forest density, runout zones, and terrain traps.
The Avalanche Terrain Exposure Scale (ATES) was developed in the early 2000s to help simplify avalanche terrain assessment for a wide variety of recreational users. The original version was used to rate specific trails or routes and it gradually developed into a system used to create ATES zones that cover an entire basin or mountainside. Traditional ATES mapping is done by local experts who are familiar with the terrain and snowpack in an area. The process is time consuming and challenging to undertake even with a great deal of local familiarity.
Automated Avalanche Terrain Exposure Scale (AutoATES) mapping was initially developed in 2020 by Håvard Toft and colleagues to streamline the manual mapping process and make it possible to create nationwide ATES maps in Norway. Over the past five years, an international collaboration of researchers and practitioners have worked to improve the methods and test the performance of AutoATES against traditional manual ATES maps in Canada. The goal of AutoATES is to help simplify avalanche terrain assessment by providing an objective and consistent representation of avalanche terrain that can assist backcountry users in making informed avalanche risk management decisions.
WHAT IS AUTOATES?
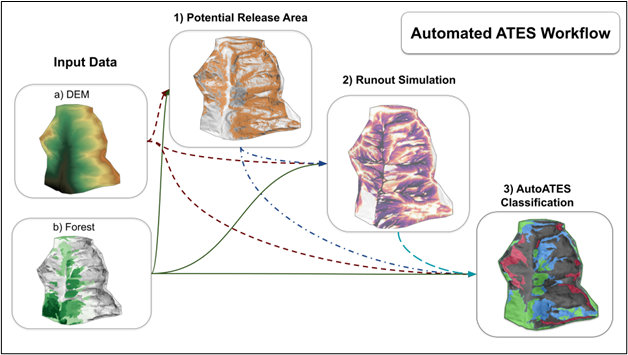
AutoATES mapping is an open-source (free) software tool that uses geographic information science (GIS) and remote-sensing methods to create avalanche terrain maps that can be produced at low cost and applied at the mountain range scale. To create AutoATES maps there are three basic steps:
- Identify avalanche start zones.
- Use the start zones to simulate avalanche runouts.
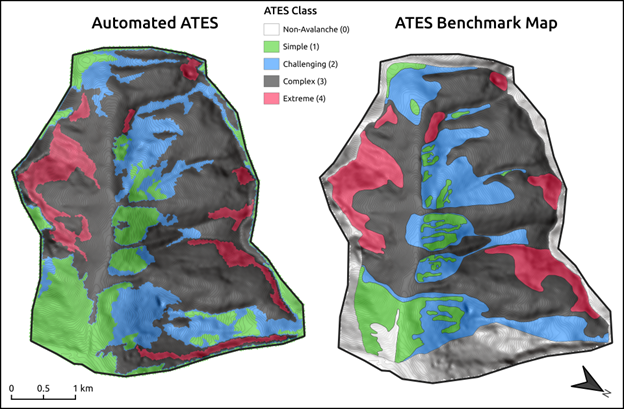
- Classify the terrain into the ATES v2.0 system (0 – non-avalanche, 1 – simple, 2 – challenging, 3 – complex, 4 – extreme) based on the physical characteristics of the terrain.
The output of AutoATES includes three main map layers, which can serve as trip-planning resources for online and mobile mapping applications by illustrating potential start zones, runout zones, and ATES ratings. Each step in the AutoATES model can be tuned for local conditions by having local experts evaluate the output maps and tweaking model parameters. The goal of this article is to shed light on how
automated ATES mapping works by answering the following questions:
- What are the components of the AutoATES model and how do they work?
- How does AutoATES compare to expert human ATES maps?
- What are the common applications of AutoATES and what is required to apply it in new areas?
To answer all these questions in a short article I need to skip a lot of detailed information, but interested readers should check out Toft et al. (2024) and Sykes et at. (2024) for more detailed information.
INPUT DATA
Before I get into how AutoATES works, we need to briefly discuss the necessary input data to run AutoATES: a digital elevation model (DEM) and a forest density data set. Both these data sets need to be formatted as raster data, which means the area they cover is represented by pixels with a fixed size (typically 5–30 m2), similar to the pixels of a digital photograph. In Canada, there are a variety of different DEM and forest data, which range in quality and spatial resolution. For context, the state-of-the-art avalanche terrain maps available in Switzerland (https://whiterisk.ch) are 5 m resolution. To get input data of this quality in Canada you typically need to buy it, which significantly increases the cost of creating AutoATES maps. However, 30 m resolution DEM and forest data is commonly available for free online. Despite the low resolution, I used this type of data to create AutoATES maps for Bow Summit in Banff National Park and Connaught Creek in Glacier National Park with good results (more details to follow).
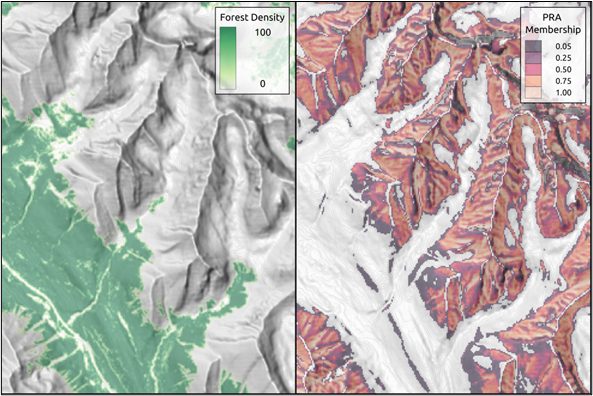
STEP 1: PRA MODEL
The first step in the AutoATES model chain is to identify potential avalanche release areas (PRA) using DEM and forest data. The PRA model
determines the likelihood of each pixel being a start zone (with a number ranging from 0 to 1) by considering the slope incline, terrain exposure to wind, and forest density. This is the first place where parameter tuning can help adapt AutoATES to local conditions. In areas with a more maritime snow climate, avalanches tend to start in steeper terrain because wetter snowfall and deeper snowpacks tend to stick to steeper slopes. Adjusting the slope angle parameter will shift the PRA model output to capture steeper or less steep start zones, depending on what is needed locally. Similarly, adjusting the forest density parameter will alter how much start zones are allowed to occur in forested areas depending on local forest characteristics. Working with local experts to validate the output of the PRA model is recommended before moving on to step two (runout simulation) because any errors in the PRA model will trickle down through the entire
model chain.
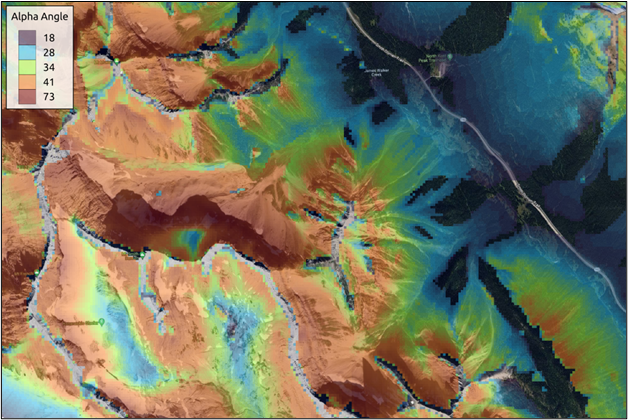
STEP 2: RUNOUT MODEL
AutoATES uses a runout simulation tool called FlowPy (D’amboise et al., 2022) to capture the runout distance and potential size of avalanches. Defining the maximum alpha angle for the local area is required to run FlowPy, which determines how far avalanches will run relative to the location of their starting PRA pixel. For AutoATES, the default alpha angle value ranges from 18-25°, depending on whether or
not the final AutoATES map will display the optional ATES Class 0 (non-avalanche terrain).
Incorporating feedback from local avalanche experts is highly recommended for tuning the alpha angle parameter to capture historic runout patterns in the local area. The output of FlowPy provides layers that capture the alpha angle from the nearest start zone pixel as well as the potential size of avalanche that a start zone can produce. These runout simulations tend to be conservative (biased toward capturing low frequency avalanche paths) compared to other methods, but are intentionally tuned that way in order to avoid under-representing the overhead hazard potential in the final ATES map.
STEP 3: ATES CLASSIFICATION
The final step in the AutoATES model chain is determining the ATES classification. Each pixel within the study area is classified using the ATES v2.0 scale (0—non-avalanche, 1—simple, 2—challenging, 3—complex, 4—extreme) based on the slope angle, forest density, runout alpha angle, runout potential avalanche size, and location of potential release areas. The ATES classification is determined by a set of input
parameters that define the slope angle, alpha angle, overhead hazard, and forest density thresholds for each ATES class.
This is the final place where tuning parameters can be useful to customize AutoATES output for the local area. Consulting with local experts, or comparing AutoATES to existing manually generated ATES maps, if available, can be useful to fine-tune the output. To make the AutoATES
output appear more similar to traditional manual ATES maps, there is also a parameter to remove small islands of pixels that do not match the surrounding ATES class. This is an optional feature that intentionally reduces the resolution and precision of AutoATES in the interest of a simpler and more streamlined final output.
HOW ACCURATE IS AUTOATES?
AutoATES works differently than traditional human-generated ATES maps, which makes true accuracy assessment difficult because comparing AutoATES to manual ATES is like comparing apples and oranges. The reason is that AutoATES classifies the terrain based on the physical characteristics of each pixel within the study area, which would be a highly inefficient method for human mappers to undertake due to the sheer number of calculations.
Traditional ATES maps tend to group terrain features into polygons and then classify the entire polygon based on the general terrain characteristics. The manual approach leverages the strengths of avalanche experts by considering multiple spatial scales when drawing the polygons and creating their ratings, which would be difficult to replicate in an automated way. However, one disadvantage to the manual approach is that individual avalanche experts may draw polygons very differently from one another, leading to subjective differences in the final ATES map.
Despite the differences between automated and manual approaches, it is important to compare AutoATES to existing ATES maps to get a sense of the overall accuracy and help tune the parameters of the automated approach to best match existing maps. To achieve this, two sets of benchmark maps were created for Bow Summit and Connaught Creek by having three experts create independent maps and then collaborate to create a final consensus map. This approach limited individual subjectivity, which can have a strong influence on ATES mapping.
Compared to the ATES benchmark maps, AutoATES produced accurate ATES ratings in roughly 85% of the terrain in Bow Summit and 75 % of the terrain in Connaught Creek. Areas where AutoATES tended to not align well with the benchmark maps were:
- in forested runout zones, where runout distance is often overestimated by AutoATES;
- and in identifying the boundary between complex and challenging terrain in alpine areas, where AutoATES tends to rely heavily on slope incline and may underestimate the impacts of multiple overlapping avalanche paths.
Further improvements have been made to AutoATES since this comparison was carried out to try and address these limitations. Future research will aim to provide a larger comparison across multiple snow climates and mountain ranges.
HOW DO YOU APPLY AUTOATES TO A NEW AREA?
AutoATES is a free software that is available to anyone on GitHub. However, applying AutoATES requires some technical expertise in GIS and basic skills in Python programming. Keen readers can try it out with the default parameters and see how the output looks for your local area. The quality of the output of any model is driven by the quality of the input, so I recommend spending some time looking for the best available DEM—especially forest data—for your study area before jumping in. Use the tips for working with local experts in the above sections to validate the AutoATES output and customize the model parameters for your local area.
Additional information on applying AutoATES is available in Toft et al. (2024) and Sykes et al. (2024). If your business is interested in trying AutoATES mapping but lacks the internal resources to create your own maps, reach out to ak.cryosphere@gmail.com for information about avalanche terrain modeling consulting services.
AUTOATES AS A TOOL FOR POST-WILDFIRE TERRAIN ASSESSMENT
One special application of AutoATES that could be particularly useful in Canada is the ability to rapidly assess wildfire impacts on avalanche terrain exposure (Miller et al., 2023). Forest characteristics play a large role in mitigating avalanche formation by anchoring the snowpack in forested runout zones, where runout distance is often overestimated by AutoATES; and interrupting the radiation balance that can cause the formation of weak layers. AutoATES is capable of using satellite remote sensing data to characterize forest density pre- and post-wildfire to estimate the impacts on formation of new start zones and runout zones.
The satellite imagery used to create forest density data for AutoATES is captured globally every 5–10 days, which means a new forest density data set can be generated within weeks of a wildfire event depending on time of season and visibility conditions. This information can be useful for operations to rapidly evaluate the extent of changes to forest cover and avalanche terrain within their area.
CONCLUSION
AutoATES is an avalanche terrain evaluation tool that aims to produce accurate and consistent maps that can assist backcountry recreationists in making informed risk management decisions. Compared to manual ATES methods, AutoATES is capable of producing maps for much larger areas at a lower cost while also being customizable for regional snowpack and forest characteristics. As with any model, it will never be perfectly accurate, but the development team aims to continually improve AutoATES to better capture the nature of avalanche terrain and represent the ATES v2.0 scale as precisely as possible.
After receiving feedback from test sites in western North America, Austria, and Norway, AutoATES has demonstrated that it can produce valuable trip planning resources, especially when tuned in collaboration with local avalanche experts. Please reach out if you have questions or feedback on AutoATES or want to contribute to future developments of the open source model.
REFERENCES
D’amboise, C., Neuhauser, M., Teich, M., Huber, A., Kofler, A., Perzl, F., Fromm, R., Kleemayr, K., & Fischer, J.-T. (2022). Flow-Py v1.0: A customizable, open-source simulation tool to estimate runout and intensity of gravitational mass flows. Geosci. Model Dev, 15, 2423–2439. https://doi.org/10.5194/gmd-15-2423-2022
Miller, Z., Sykes, J., Guinn, M., VandenBos, B., Savage, S., & Peitzsch, E. (2023). Spatial extent of forested avalanche terrain impacted by wildfire across the Sawtooth National Forest. International Snow Science Workshop Proceedings 2023, Bend, Oregon, 272–279.
Statham, G. and Campbell, C.: The Avalanche Terrain Exposure Scale (ATES) v.2, Nat. Hazards Earth Syst. Sci., 25, 1113–1137, https://doi.org/10.5194/nhess-25-1113-2025, 2025
Sykes, J., Toft, H., Haegeli, P., and Statham, G.: Automated Avalanche Terrain Exposure Scale (ATES) mapping – local validation and optimization in western Canada, Nat. Hazards Earth Syst. Sci., 24, 947–971, https://doi.org/10.5194/nhess-24-947-2024, 2024
Toft, H. B., Sykes, J., Schauer, A., Hendrikx, J., and Hetland, A.: AutoATES v2.0: Automated Avalanche Terrain Exposure Scale mapping, Nat. Hazards Earth Syst. Sci., 24, 1779–1793, https://doi.org/10.5194/nhess-24-1779-2024, 2024